4.7 KiB
Getting Started
{: .no_toc }
There are a number of steps that must be completed when first getting started with Stabilizer.
- Update the Stabilizer Application
- Build the application by compiling the source code.
- Upload the application and programming it onto the device.
- Set up MQTT for telemetry and configuration.
The following sections will walk you through completing each of these steps.
Update Stabilizer
Firmware is compiled and loaded onto Stabilizer to program a specific application.
After receiving the Stabilizer hardware, you will need to flash firmware onto the device to use your desired application.
Building Firmware
- Clone or download stabilizer
git clone https://github.com/quartiq/stabilizer
- Get rustup
- The minimum supported Rust version (MSRV) is 1.52.0
- Install target support
rustup target add thumbv7em-none-eabihf
- Build Firmware with an optionally-specified MQTT broker IP.
BROKER="10.34.16.10" cargo build --release
Uploading Firmware
Firmware is loaded onto stabilizer utilizing an ST-Link (V2-1 or greater) JTAG programmer.
- If a programmer is not available, please see the alternative method
Ensure the ST-Link is connected to Stabilizer as shown below.
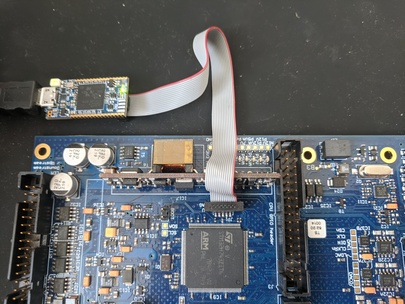
All of the instructions below assume you have properly built the firmware.
Substitute dual-iir below with the application name you are flashing.
- Install cargo-binutils
cargo install cargo-binutils
rustup component add llvm-tools-preview
- Generate the binary file
cargo objcopy --release --bin dual-iir -- -O binary dual-iir.bin`
- Copy
dual-iir.bininto the ST-Link drive on your computer.
Alternative: Using USB
If an ST-Link V2-1 or above is not available, you can upload firmware using a micro USB cable plugged in to the front of Stabilizer.
- Install the DFU USB tool
dfu-util - Connect to the Micro USB connector below the RJ45
- Short JC2/BOOT
- Perform the Device Firmware Upgrade (DFU)
dfu-util -a 0 -s 0x08000000:leave -D dual-iir.bin
Alternative: Firmware Development / Debug
The below instructions are useful for debugging or developing firmware
For an interactive flash experience with live logging, utilize probe-run as follows.
- Install
probe-run
cargo install probe-run
- Build and run firmware on the device
cargo run --release --bin dual-iir
- When using debug (non
--release) mode, decrease the sampling frequency significantly. The added error checking code and missing optimizations may lead to the code missing deadlines and panicing.
Set up and test MQTT
Set up the Broker
Stabilizer requires an MQTT broker that supports MQTTv5. Mosquitto has been used during development, but any MQTTv5 broker is supported.
Note: Mosquitto version 1 only supports MQTTv3.1. If using Mosquitto, ensure version 2.0.0 or later is used.
Stabilizer utilizes a static IP address for broker configuration. Ensure the IP address was configured properly to point to your broker before continuing.
We recommend running Mosquitto through Docker to easily run Mosquitto on
Windows, Linux, and OSX. After docker has been installed, run the following command from
the stabilizer repository:
docker run -p 1883:1883 --name mosquitto -v `pwd`/mosquitto.conf:/mosquitto/config/mosquitto.conf -v /mosquitto/data -v /mosquitto/log eclipse-mosquitto:2
Note: The above command assumes a bash shell. If using powershell, replace
`pwd`with${pwd}
This command will create a container named mosquitto that can be stopped and started easily via
docker.
Test the Connection
Once your broker is running, test that Stabilizer is properly connected to it.
To do this, we will check that Stabilizer is reporting telemetry on the following topic:
dt/sinara/dual-iir/00-11-22-33-44-55/telemetry
Note: The telemetry topic will be different based on the programmed application and the MAC address of the device.
Download MQTT-Explorer to observe which topics have been posted to the Broker.
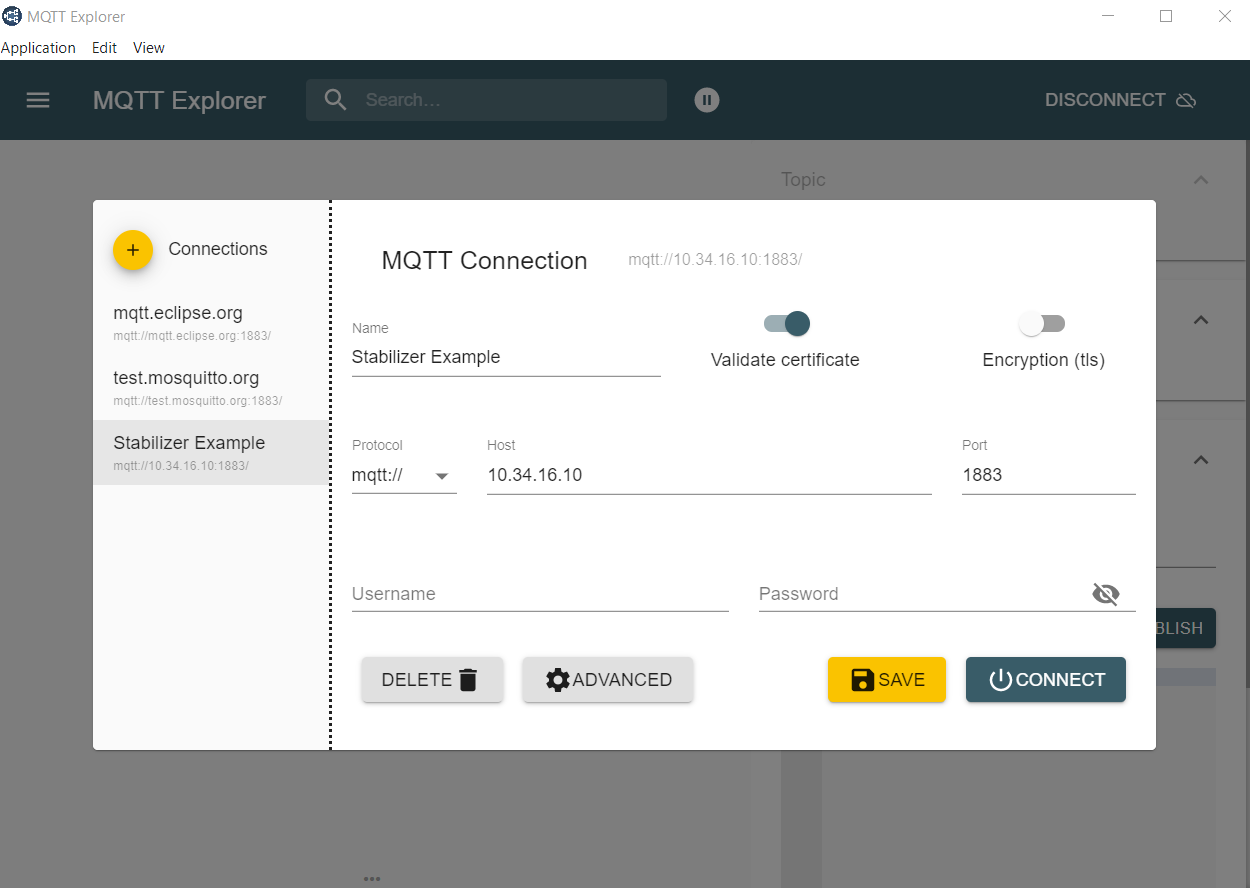
Note: Use the same broker address that you defined in the firmware for MQTT explorer.
Telemetry messages should come in approximately every 10 seconds when Stabilizer has connected to the broker. Once you observe incoming telemetry, Stabilizer has been properly configured and is operational.